WorldZone功能为ABB机器人推出的,监控当前TCP位置和关节位置的功能。主要包括:1. 可以设置例如立方体,圆柱体,球体等区域,设置当前TCP在区域内或者在区域外,输出信号2. 设置机器人HOME点关节角度及容差,当机器人在HOME点,输出信号。详细功能,可以参见ABB机器人 控制器软件手册 3106-1选项介绍
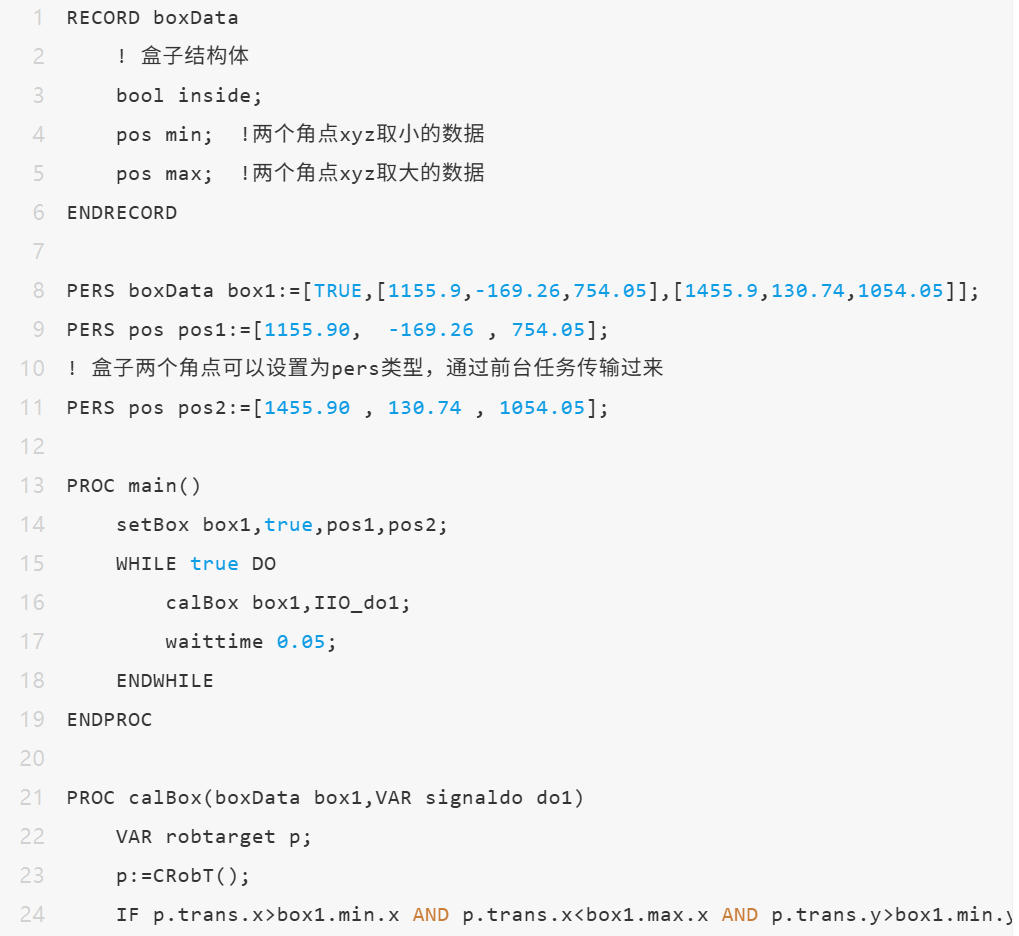
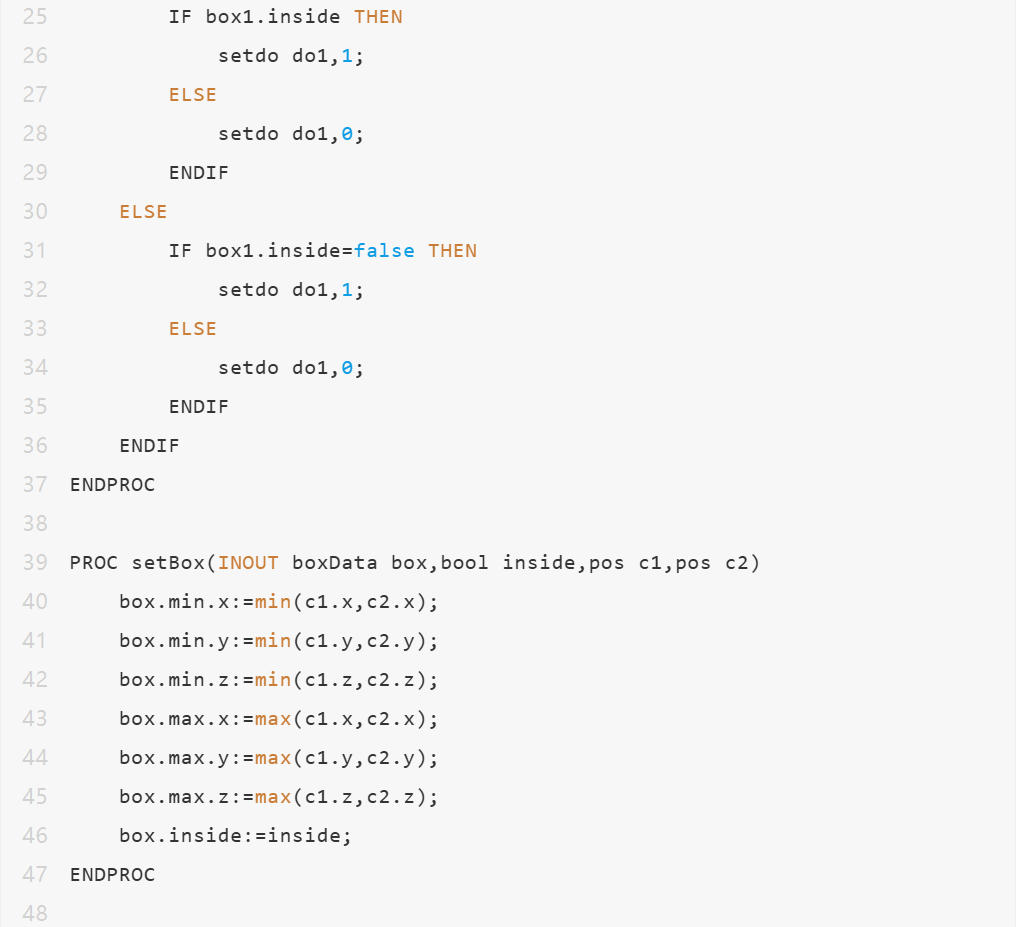
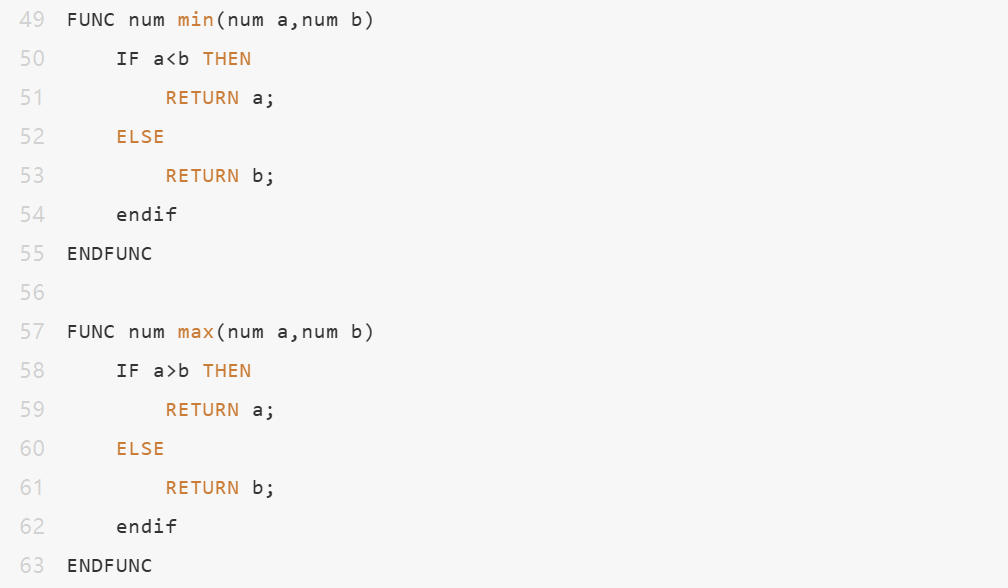
若现场暂无WorldZone选项,又需要临时实现WorldZone功能,则可以参考以下实现(机器人需要有多任务multi-task选项,监测代码运行在后台)1. 对于机器人空间设置,例如上图的立方体,通常可以人物采集两个对角线的角点数据。并计算两个角点中的xyz取小数据作为min,取大数据作为max。2. 判断机器人当前TCP位置在min和max之间
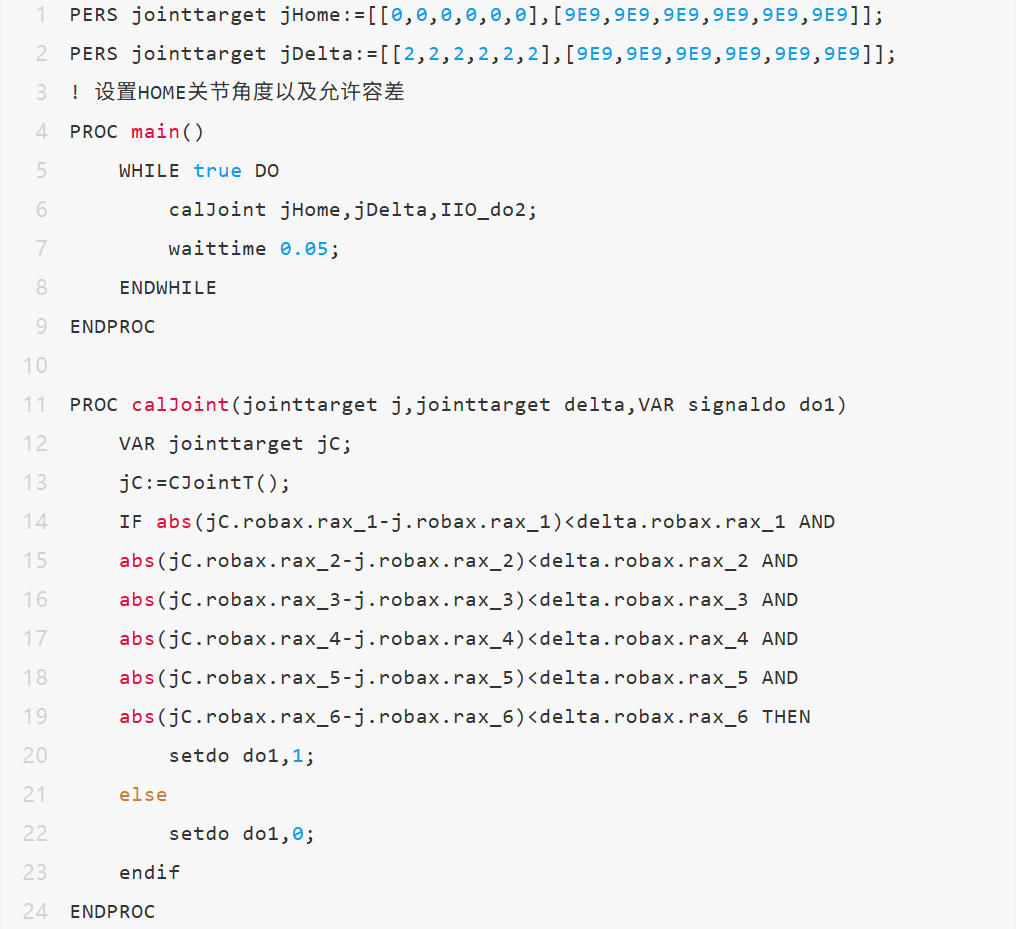
对于监控关节角度,可以参考以下代码:
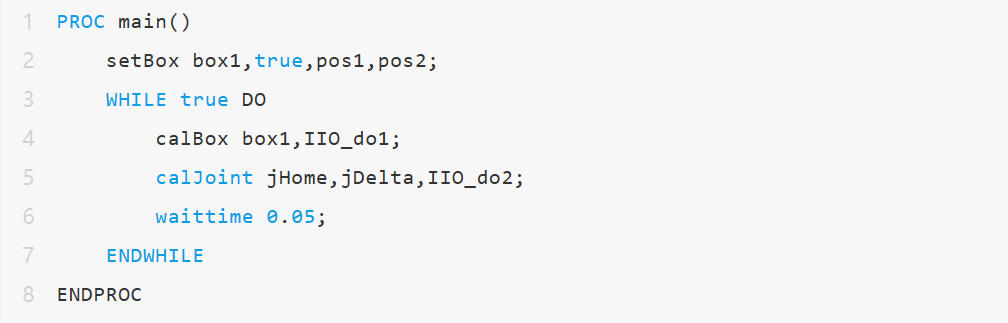
若要同时监控关节角度和区域,则整合以上代码即可:


 联系方式
联系方式服务商微信客服")