


在进行异形大尺寸工件焊接作业时,如果机器人的行程达不到要求,通常会给机器人增加外部轴,ABB机器人官方有如下外部轴可供客户选择:

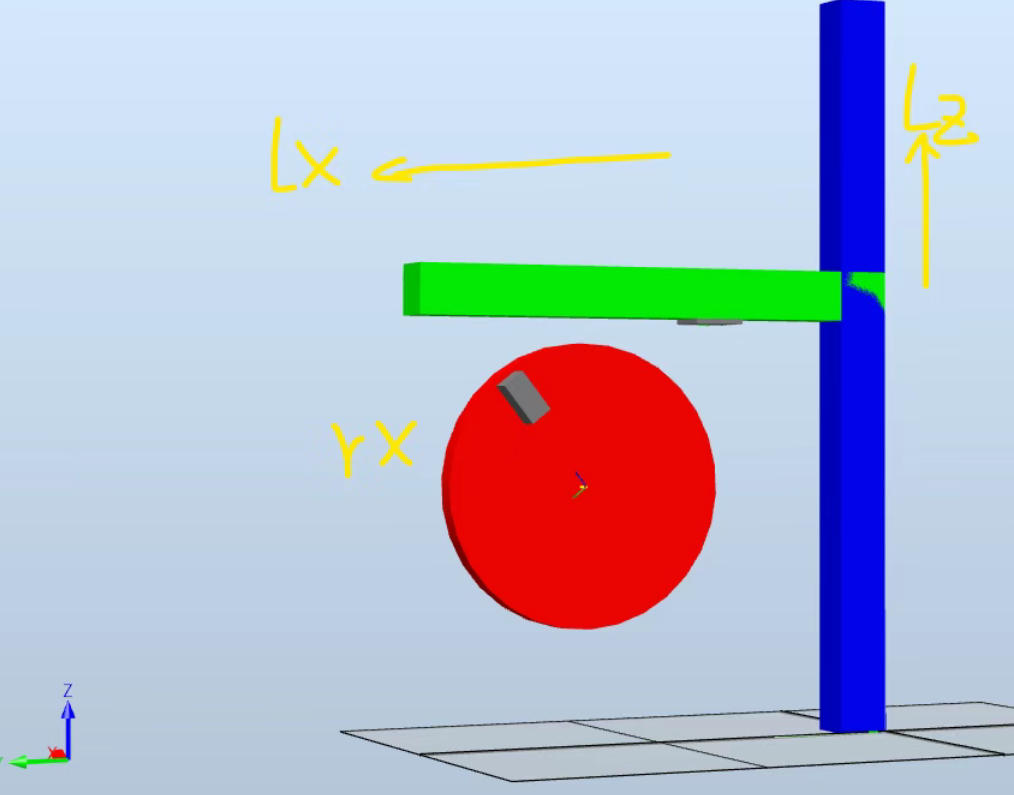
即便有如上这些外部轴,但是并不能满足所有的生产场景,如下即为客户自己设计的外部轴,其中rx为旋转轴,ly和lz为直线轴。此时外轴属于非标定制,需要自己配置机器人的moc文件,使之和机器人协同运动。以下记录配置过程中,一些需要重点注意的地方:
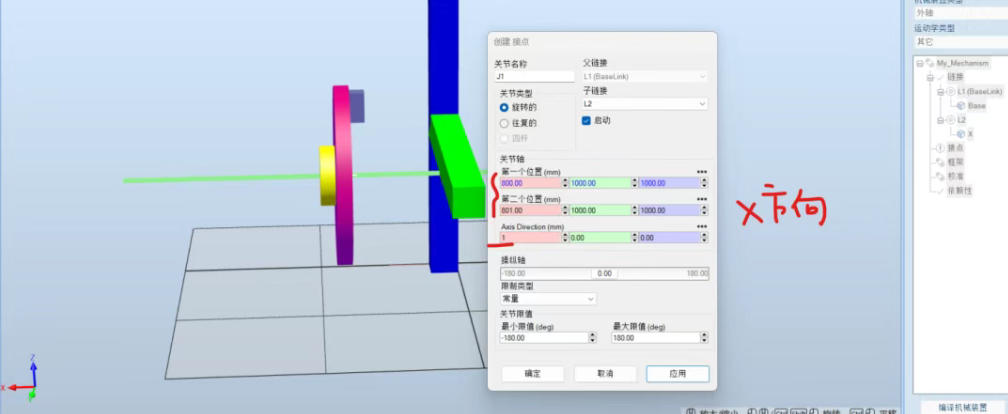
在创建机械装置rx时,用捕捉功能做如下设置(注意此时世界坐标方向),不然圆盘会绕着世界坐标系去旋转:
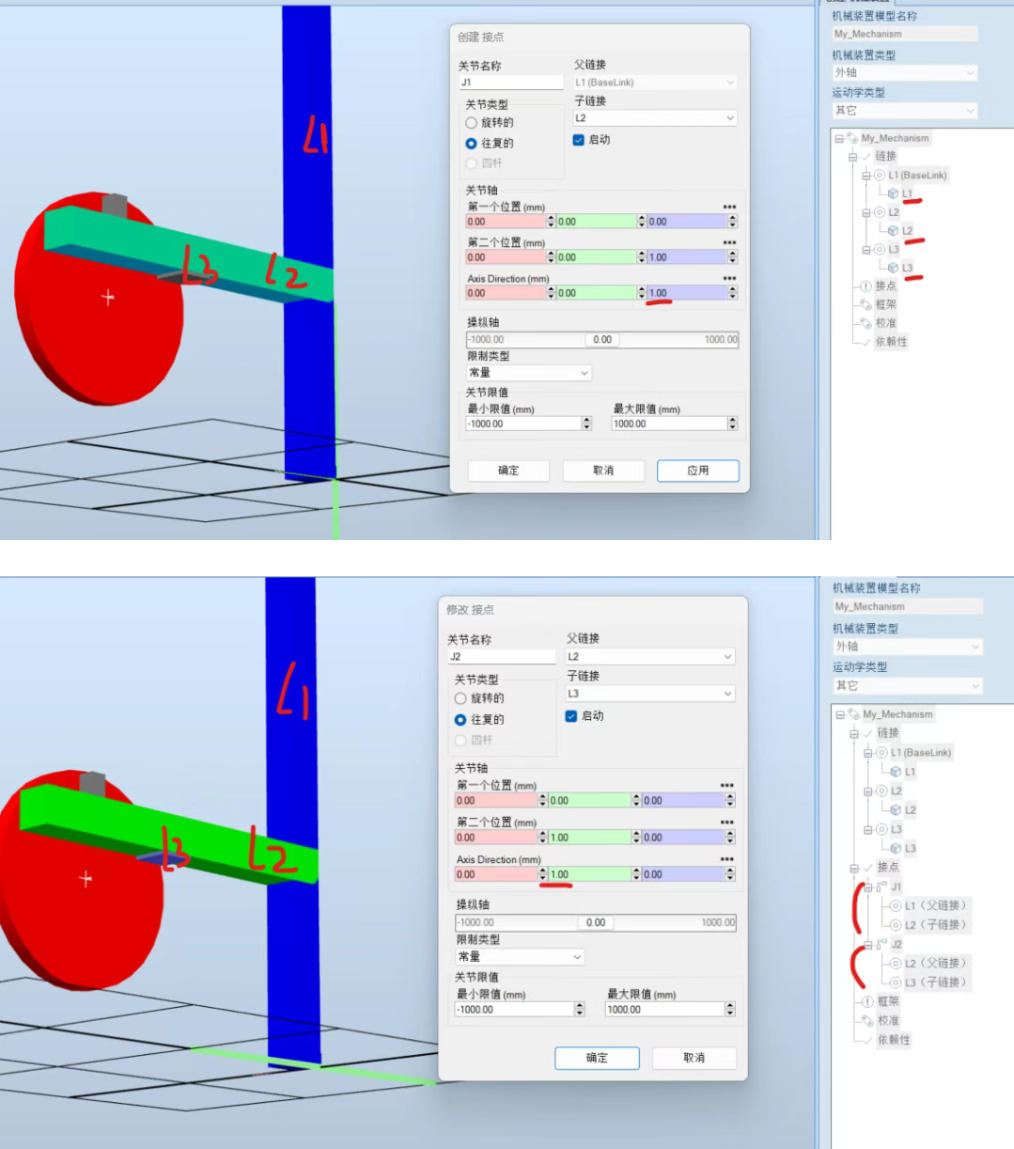
2.做直线轴时需要提前规划base底座,ly和lz,其之间满足父子关系(不同的父链接不能有相同的子链接):
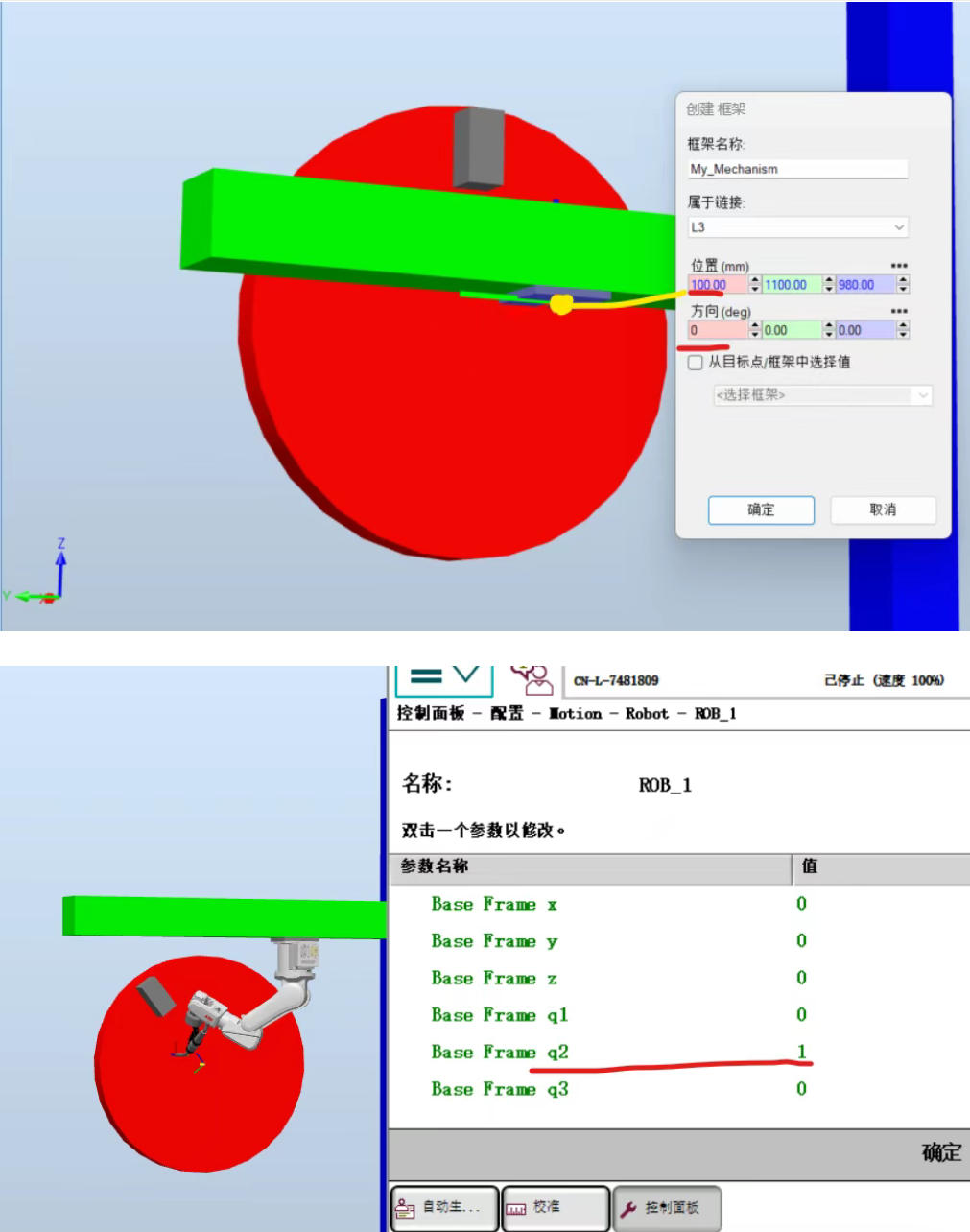
3.设定框架时,可以和世界坐标系设成一致,则后期添加机器人的时候则需修改机器人的q值为(0,1,0,0)才可以让机器人倒挂起来:
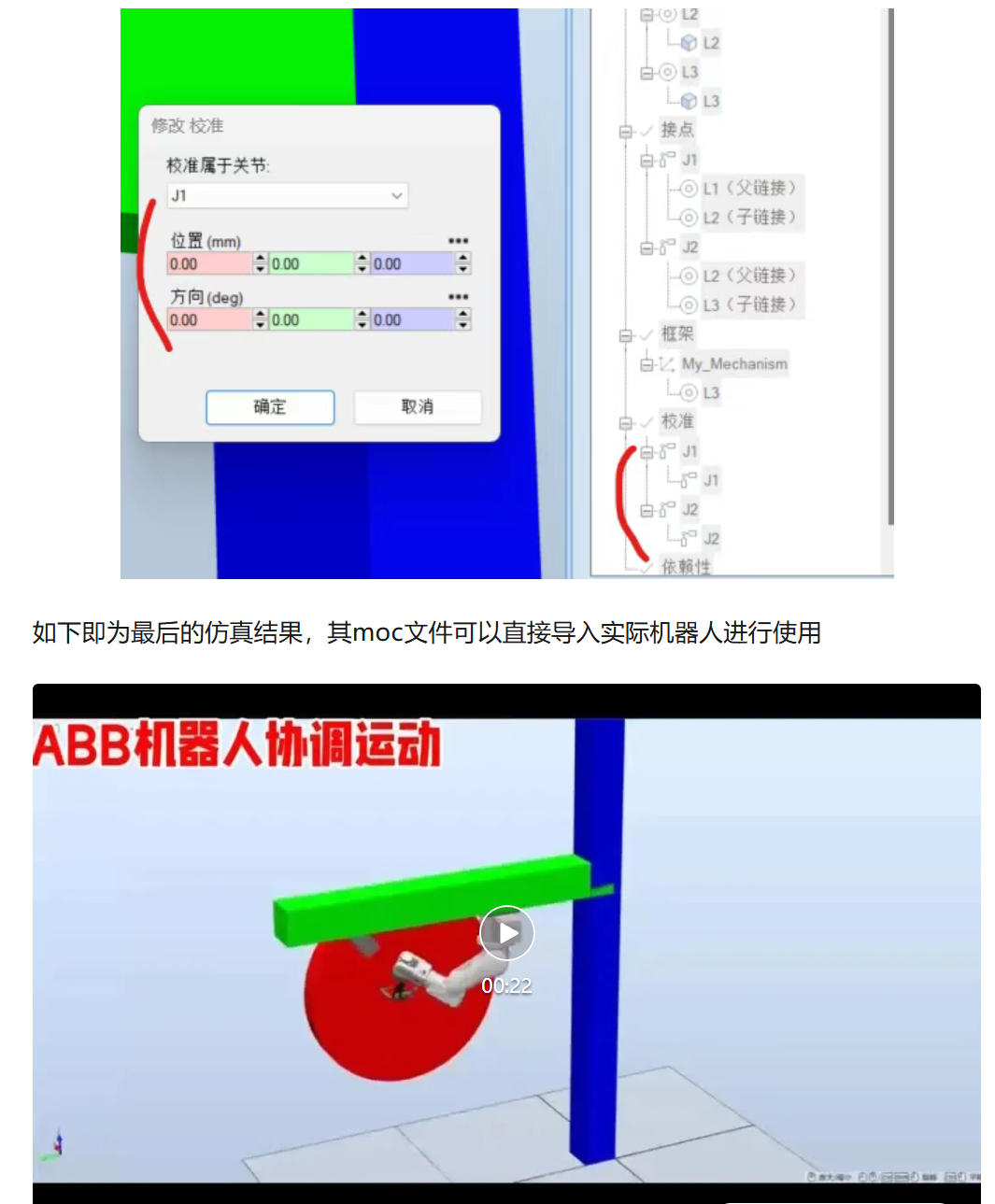
4.校准时,使用默认0即可:
服务商微信客服")