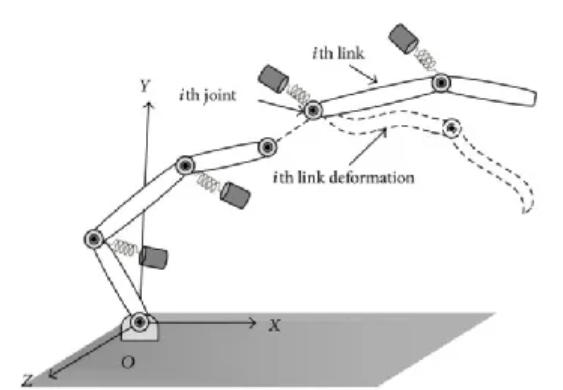
1. 机器人正运动学表示机器人根据机器人DH模型(连杆、转角等参数),计算出机器人末端对应的空间位姿。3. 机器人由于加工、组装的问题,实际装配完成的机器人的DH参数会与理论值不符合。另外,在理论模型中,认为连杆是绝对刚性的,即连杆是直线段,但实际机器人在转动时,由于重力,会造成臂的挠性形变(例如下图所示,上臂会有微小形变)。
4. 此时若采用理论DH 模型计算机器人末端位姿,(尤其对于大机器人),就会产生误差,导致机器人绝对定位位姿的偏差(机器人不知道实际DH参数和理论参数不同,不知道挠性形变带来的臂的微小形变)5. 为提高机器人的绝对定位精度(笛卡尔空间下,即XYZABC),可以对实际机器人进行标定,得到对应的实际参数模型. ABB机器人具有这样的功能选项,称为 Absolute Accuracy(绝对精度).该选项对空间joint位置提高精度无效.
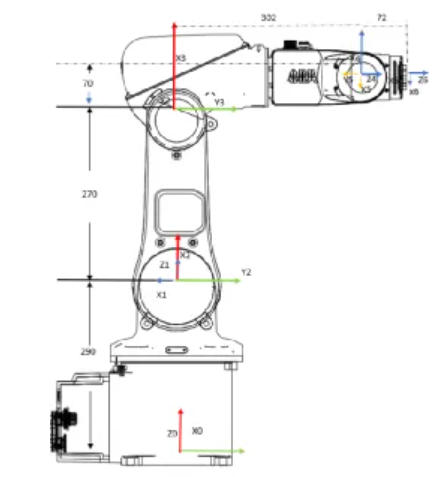
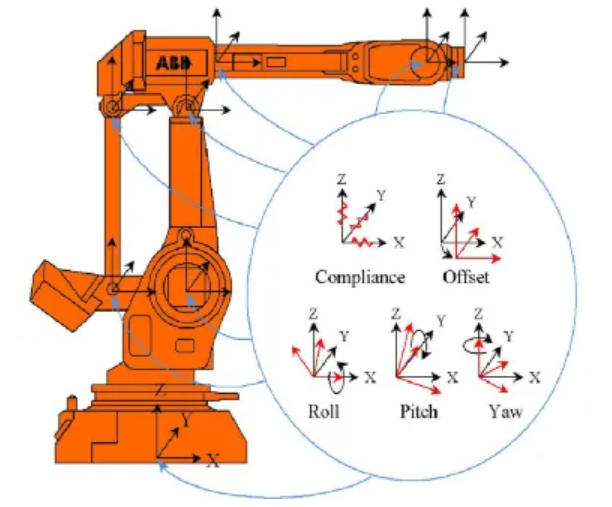
6. 由文首的机器人理论DH模型,可以构建各关键的固连坐标系(如下图各关节上的坐标系).由于实际机器人参数与理论不同,会导致这些固连坐标系发生偏移(Offset,单位米)和旋转(绕大地坐标系的RPY角,单位弧度),以及各关节由于臂的挠性形变导致的Compliance。
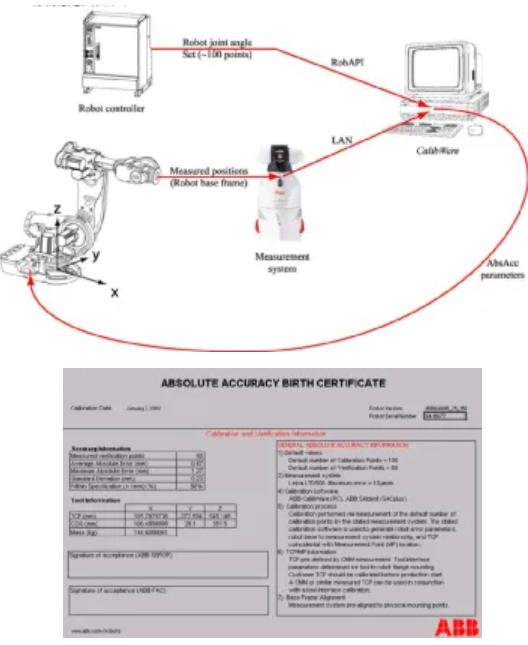
7.机器人在具有Absolute Accuracy选项后,通常还需要在机器人生产工厂,通过Leica激光跟踪仪进行机器人本体参数的标定。对于大型机器人(例如IRB6400),标定后的机器人笛卡尔空间绝对定位精度能到0.5mm级别。小型机器人精度更高(具体参见机器人相关手册)。
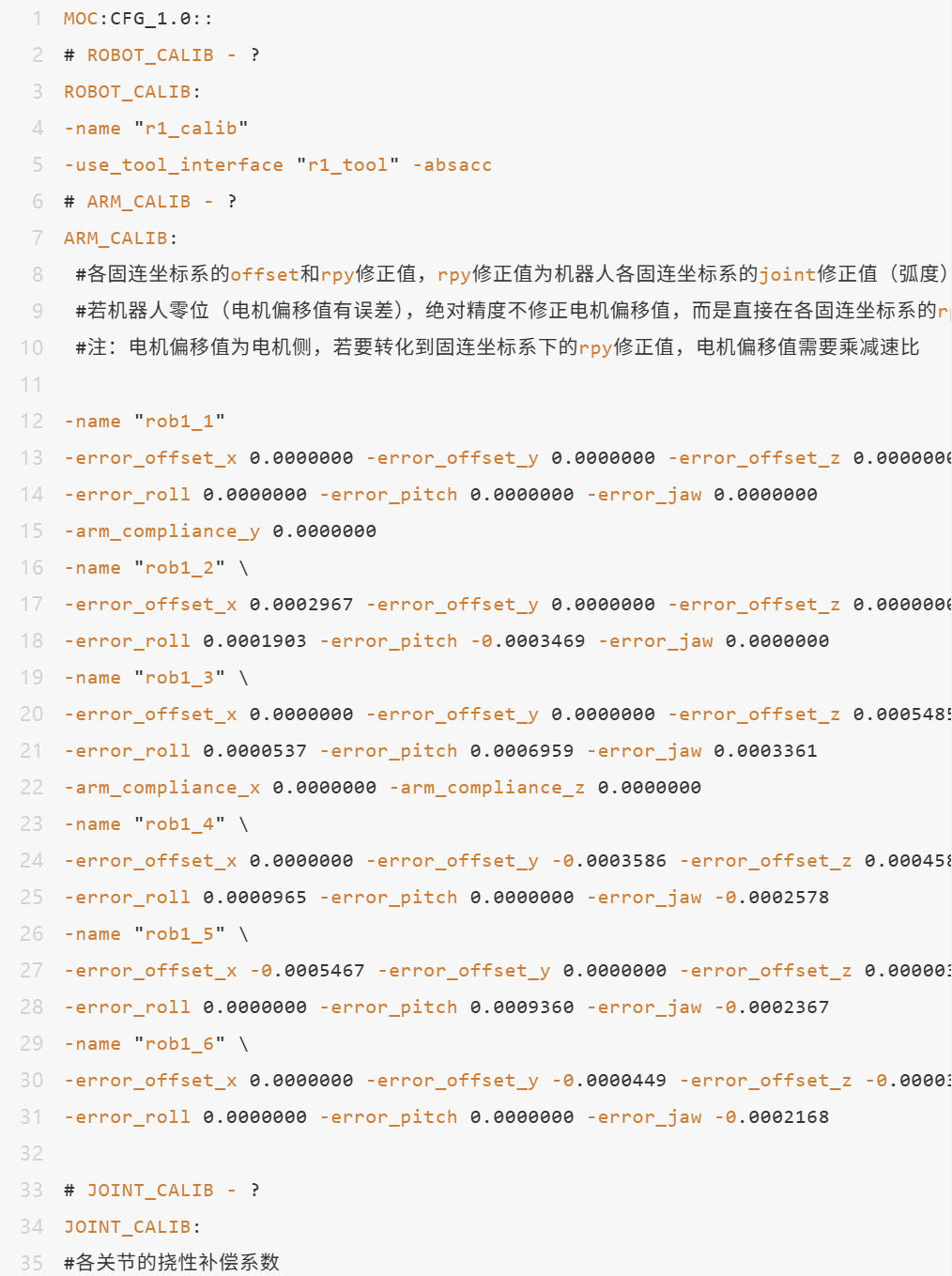
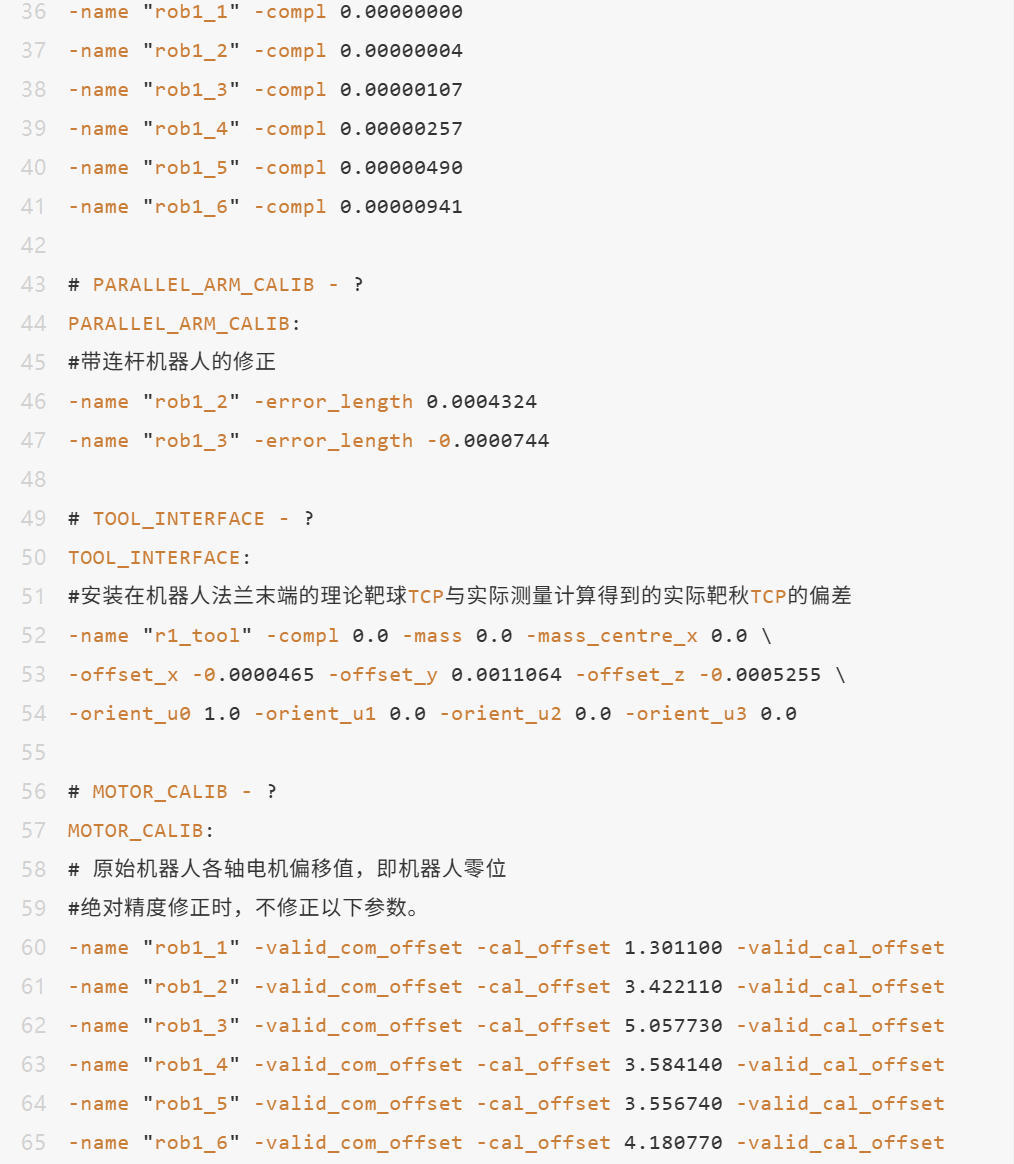
8. 绝对精度标定后,会生成该机器人的cfg文件,参数解释如下:



服务商微信客服")