



现场有如图设备:
1. 一个升降轴(上下运动)
2. 机器人按照图方式安装在升降轴上
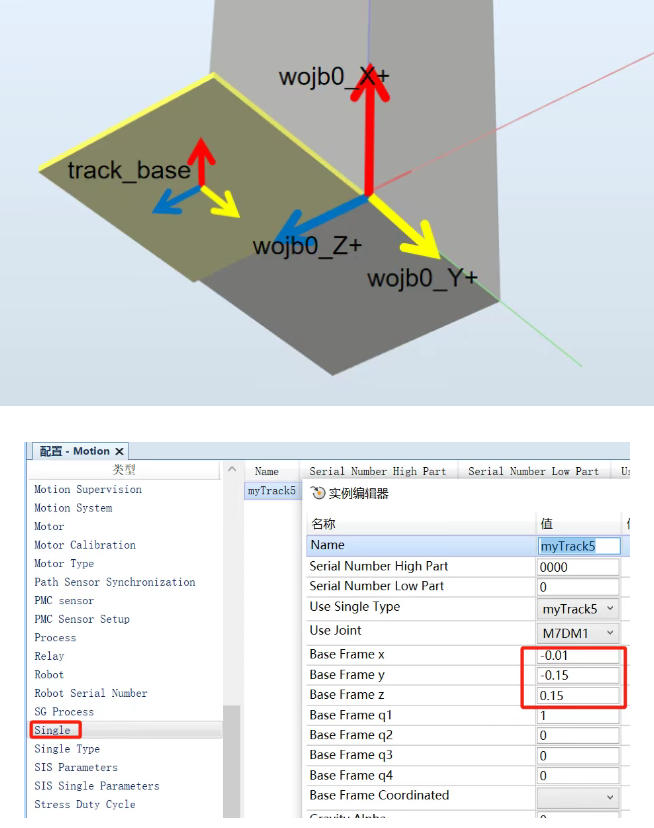
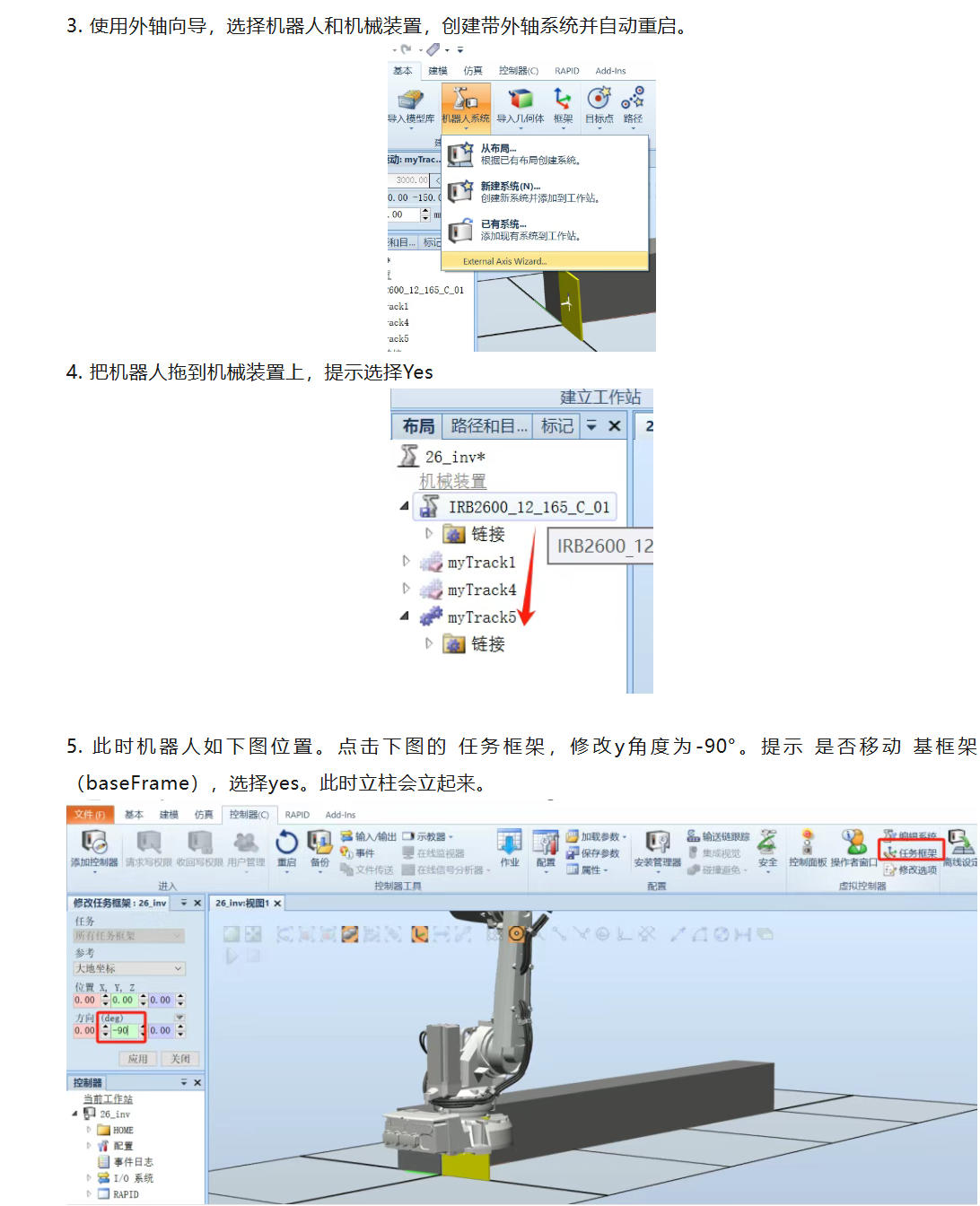
由于ABB单导轨配置,导轨的运动方向必须是wobj0的X+方向。
可以假设wobj0方向如上图。
配置导轨以及上面的机器人位置关系时,
1) 通常只设置track的base的xyz(即机器人安装中心相对于wobj0的偏移)。
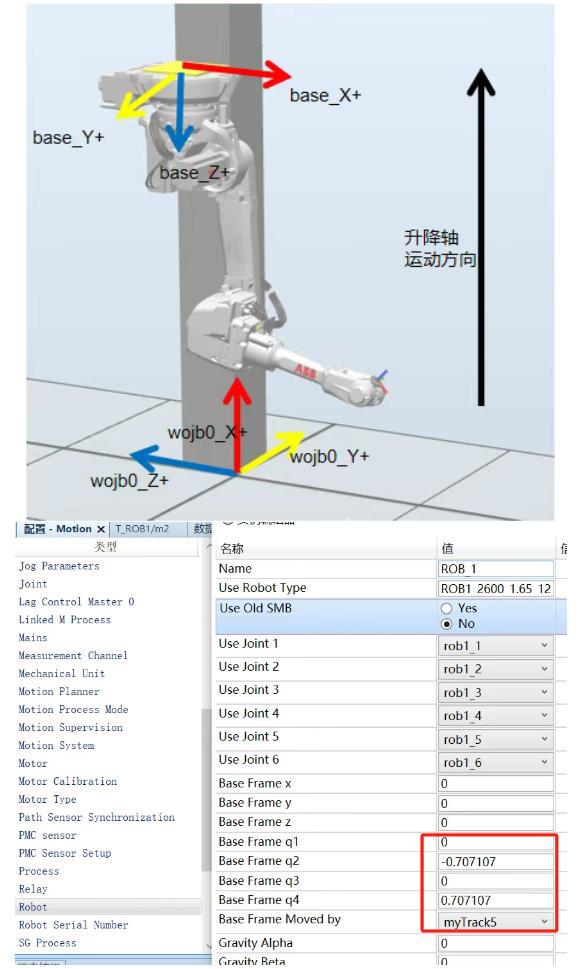
2) 在robot的base设置中,设置旋转(robot会被track驱动,所以robot的base的xyz偏移设置为0)
1. 假设wobj0方向如下图,机器人的安装位置如下图,则可以在motion配置的single中,设置track的base值(下图是wobj0的x-,y-方向和z+方向偏移,单位m),也可不设置,那么认为wobj0就在导轨处于0时,机器人安装底座位置。
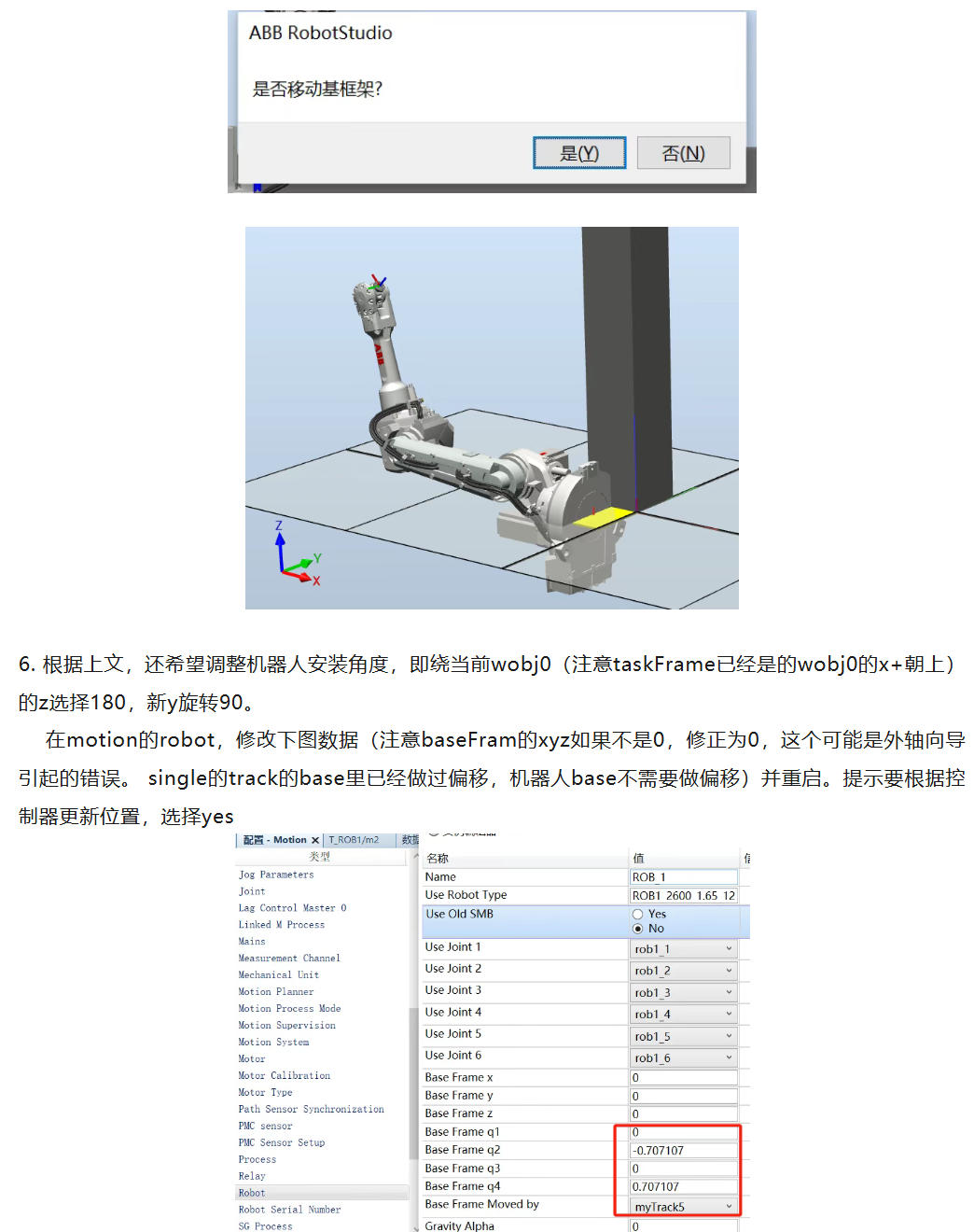
2. 实际机器人安装如下图,则机器人的base相对于track的base,是先绕track的z(也就是wobj0的z)旋转180°,再绕新的y旋转90°,对应四元数如下图。注意选择baseframeMoveby
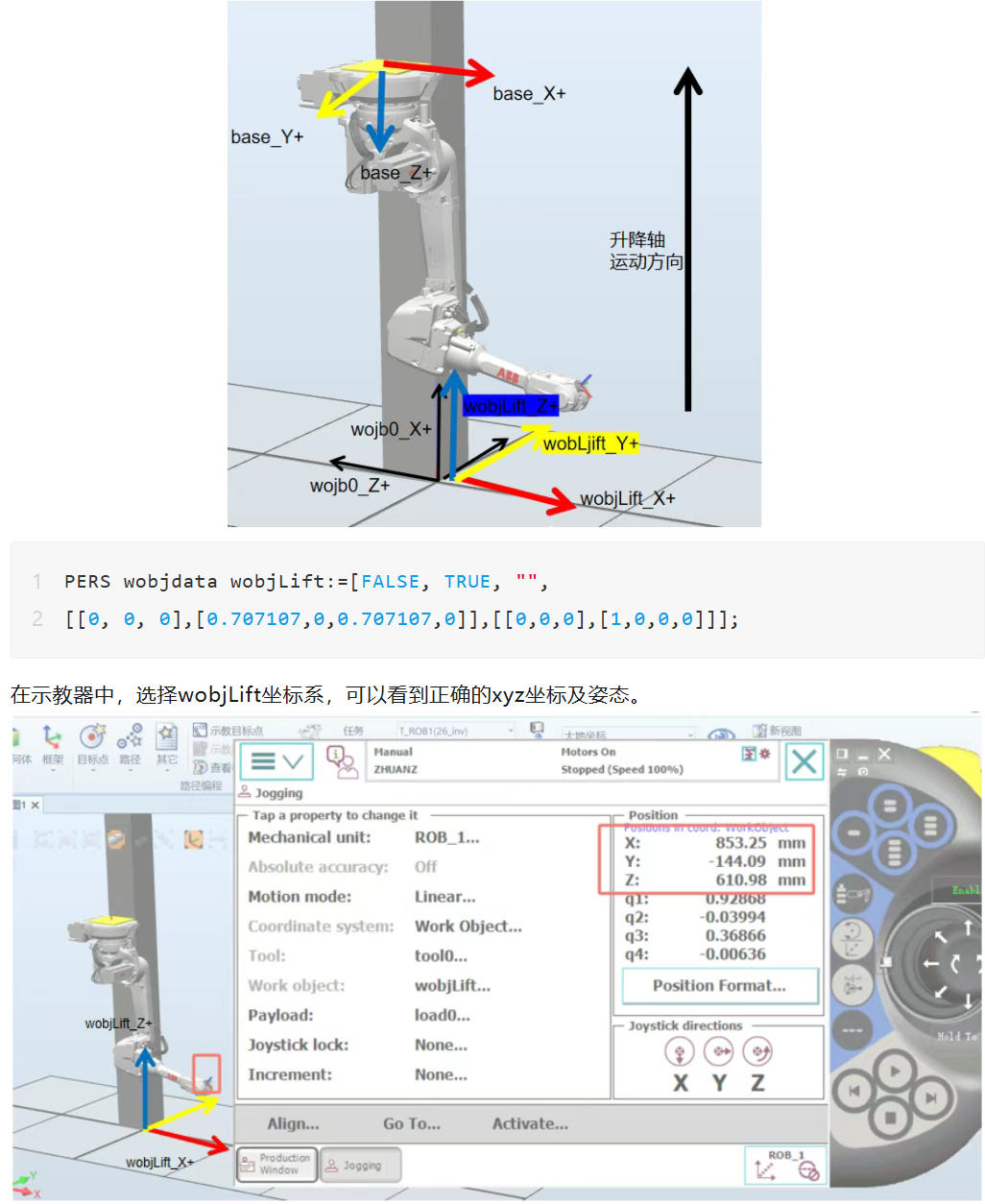
3. 以上假设wobj0的X朝上(因为导轨运动正方向必须是wobj0的X+)。实际用户还是希望Z+朝上。 可以创建一个wobjLift(基于x+朝上的wobj0,绕y旋转90°,具体四元数如下)
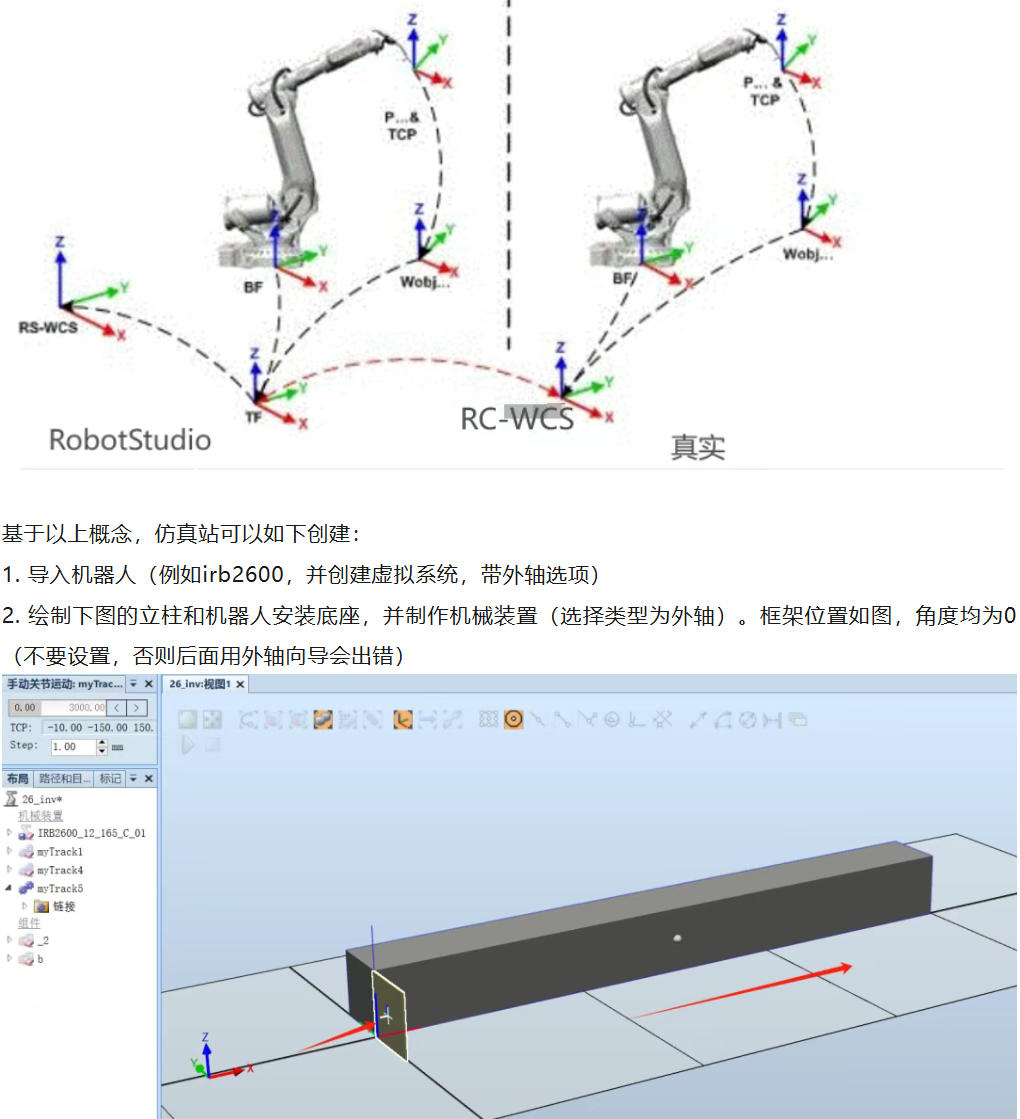
在RobotStudio的仿真,为便于多机器人控制器统一,增加了TF(Taskframe)坐标系概念。
RS-WCS(RobotStudio-World Coordinate System)是RobotStudio中的原点。创建一个机器人系统时,默认该机器人系统的TF和RS-WCS一致。也可以人为修改TF位置。
对于每个真实控制器,只有RC-WCS(Real controller- world coordinate system),对应RobotStudio中的TF。
7. 最后参照前文,创建wobjLift。就可以达到导轨上下移动,机器人参考向上为z+的坐标系数据正确的效果。
服务商微信客服")