


DH参数由1955年由 Denavit 和 Hartenberg 提出,每个连杆用 4个参数(θ, d, a, α)描述,通过 4次变换(绕Z轴旋转→沿Z轴平移→沿X轴平移→绕X轴旋转)建立相邻坐标系的关系。
mDH(Modified DH) 在1986年由 Craig 等人改进,解决标准 DH 的歧义问题。
核心变化:坐标系定义在前一关节的连杆上(而非后一关节),参数顺序调整为 θ, d, a, α,但变换顺序变为 绕X轴旋转→沿X轴平移→绕Z轴旋转→沿Z轴平移。
以下是IRB120机器人的mDH数据。

机器人末端位姿(XYZABC)就是基于以上数据和当前每个关节角的度数,计算得到。机器人逆解(从XYZABC---> 各轴角度)的计算也是基于以上数据。
对于ABB各型号机器人的理论DH数据,可以参考以下方式获得:如何获取ABB机器人DH参数,ABB机器人获取DH参数插件,RobotStudio20xx 获取6轴机器人mDH插件及制作。
但实际机器人,由于加工/装配误差,实际的真实DH与理论值有偏差。对于这样的偏差,ABB机器人可以通过 绝对精度选项进行测量和补偿(即通过外部Leica跟踪仪 采集机器人实际位置,并计算真实DH)。
绝对精度选项不仅仅补偿了DH参数,还补偿了由于重力造成的机器人手臂的挠性形变和减速机形变,具体参见:ABB机器人绝对精度选项及各参数介绍。
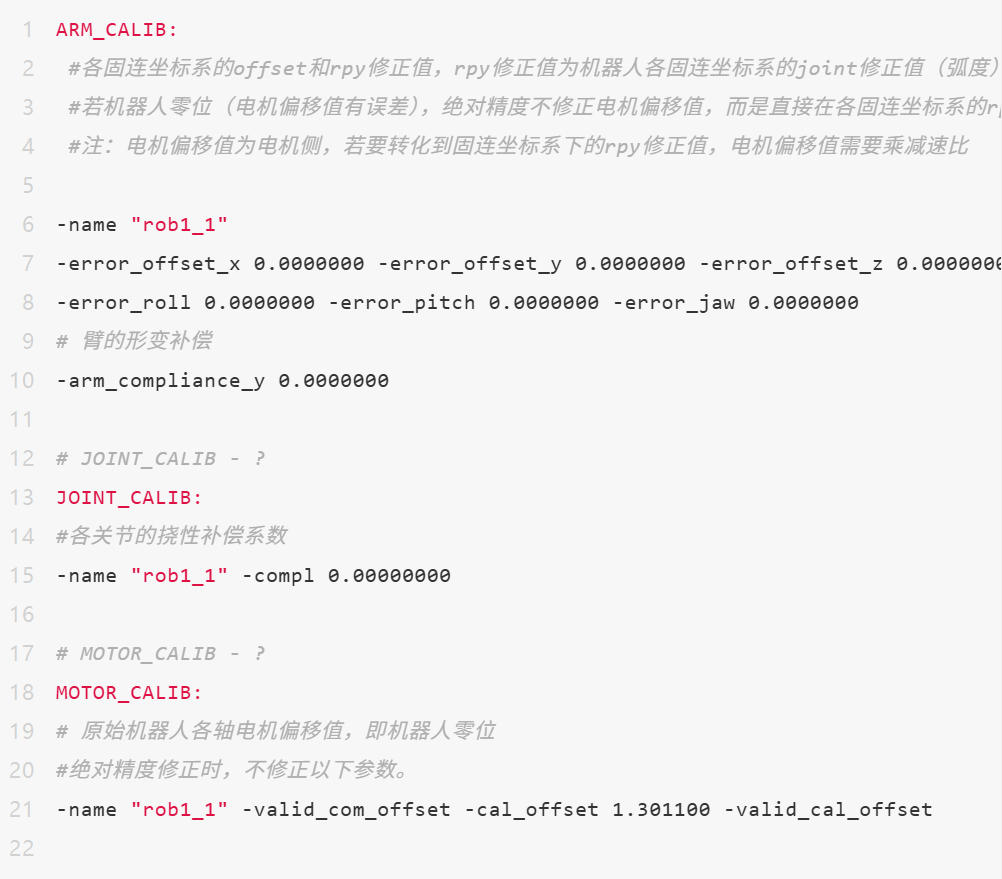
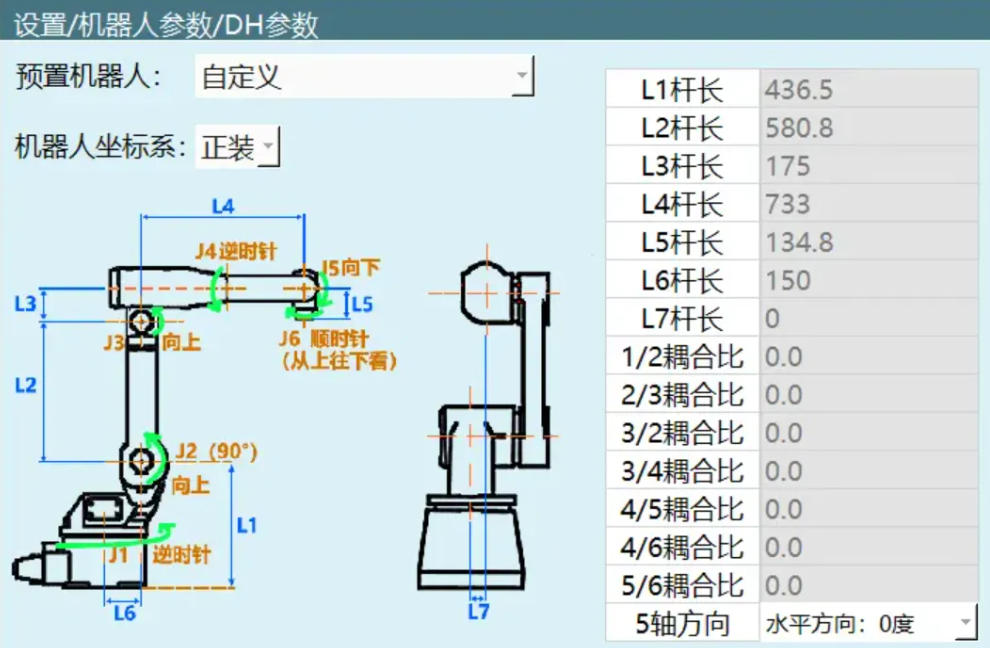
很多国产机器人支持直接在示教器修改机器人的DH参数,如下图。
ABB机器人不支持修改DH参数,只能通过添加绝对精度选项,基于Leica标定后修正。
当然,如果能对上文提到的相关moc文件足够了解,也可自行通过其他设备j计算修正值并修改。
服务商微信客服")