


机器人在交付时被配置为平行于地面的安装,没有倾斜。如果机器人以0° 以外的任 何其他角度安装,那么描述安装角度(机器人相对于重力的方向)的系统参数必须被 重新定义。
相关的系统参数:
Gravity Beta
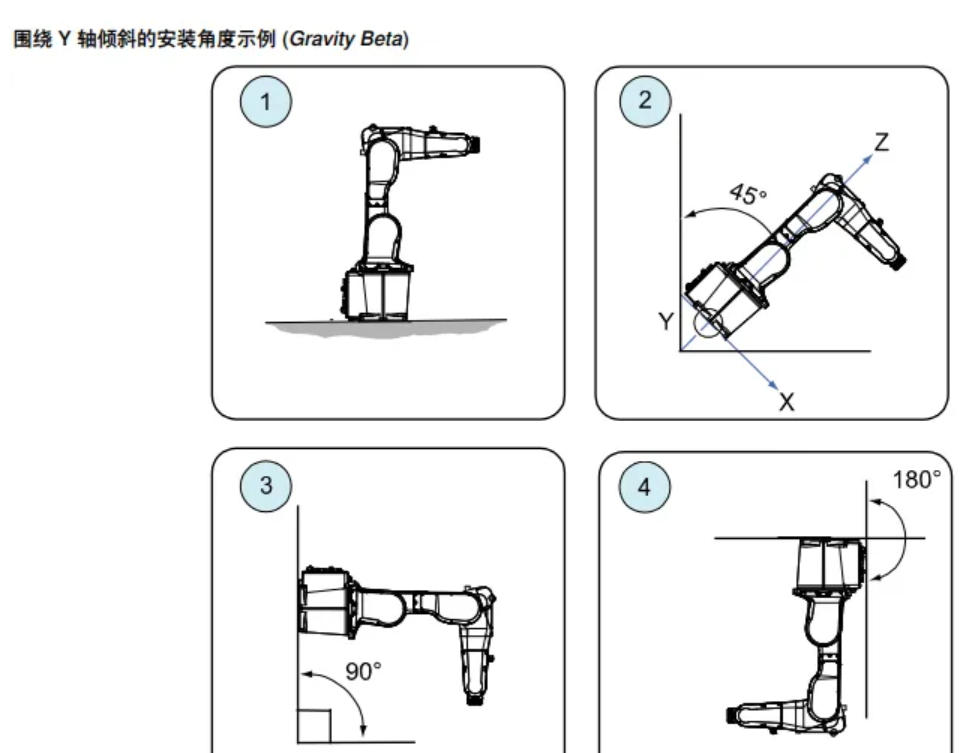
若机器人装设在倒置位置或墙壁上(绕Y轴旋转),就必须重新定义此机器人的基准 坐标系和系统参数Gravity Beta。之后Gravity Beta宜为π(+3.141593)(若将机器 人装设在倒置/悬空位置上)或±π/2(±1.570796)(若装设在墙壁上)。 Gravity Beta 是基坐标系中围绕 y 轴的正旋转方向。值以弧度设置。
Gravity Alpha
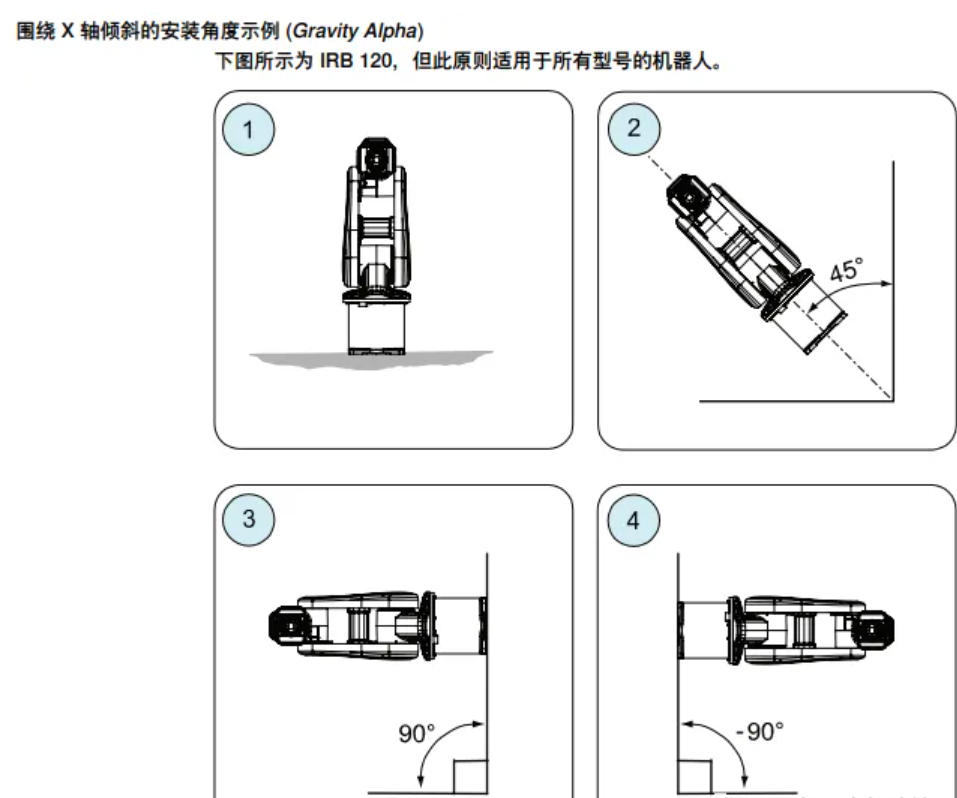
若机器人装设在墙壁上(绕X轴旋转),就必须重新定义此机器人的基准坐标系和系 统参数Gravity Alpha。之后Gravity Alpha的数值宜为±π/2(±1.570796)。 Gravity Alpha 是基坐标系中围绕x 轴的正旋转方向。值以弧度设置。
安装角度和值计算方式:
参数Gravity Beta(或Gravity Alpha)指定机器人的安装角度,以弧度表示。按照以 下方式进行计算。
Gravity Beta = A° x 3.141593/180 = B radians,
其中A是以度为单位的 安装角度,B是以弧度为单位的安装角度。
围绕Y轴倾斜的安装角度示例(Gravity Beta)
围绕X轴倾斜的安装角度示例(Gravity Alpha)
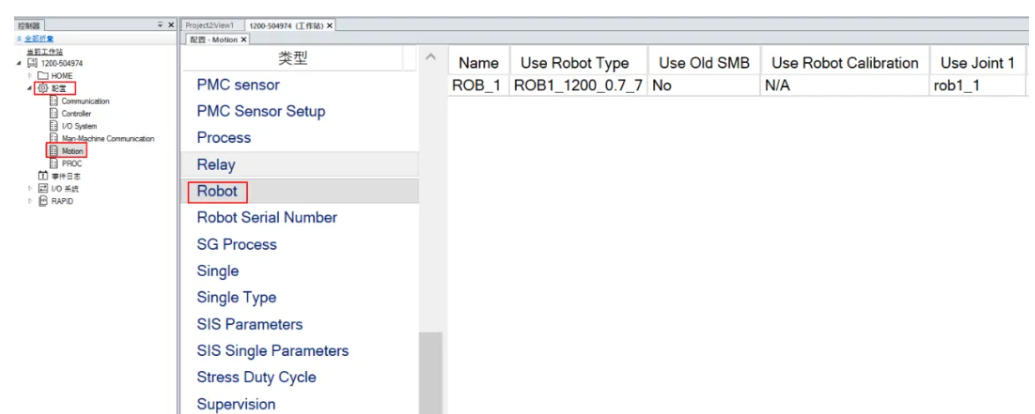
通过Robotstudio软件修改Gravity Beta和Gravity Alpha:
Robotstudio一键连接上机器人,获得写权限;配置—motion—Robot
服务商微信客服")