


测量 ABB 机器人负载主要通过机器人示教器自带的负载识别功能完成,无需额外硬件,核心是让机器人带动负载做预设运动,系统自动计算负载参数。
这个方法能精准获取负载的关键数据,是后续优化运动轨迹、避免过载报警的基础。
一、测量前的核心准备
安装负载:将待测量的夹具、工具或工件,按照实际工作状态固定在机器人第六轴法兰上,确保安装牢固无松动。
检查机器人状态:确认机器人处于 “手动” 模式,关节无异常卡滞,且工作范围内无障碍物,避免测量过程中碰撞。
记录初始信息:如果已知负载的大致重量、重心位置,可提前记录,用于后续与测量结果对比验证。
二、具体测量操作步骤(以 IRC5 控制器为例)
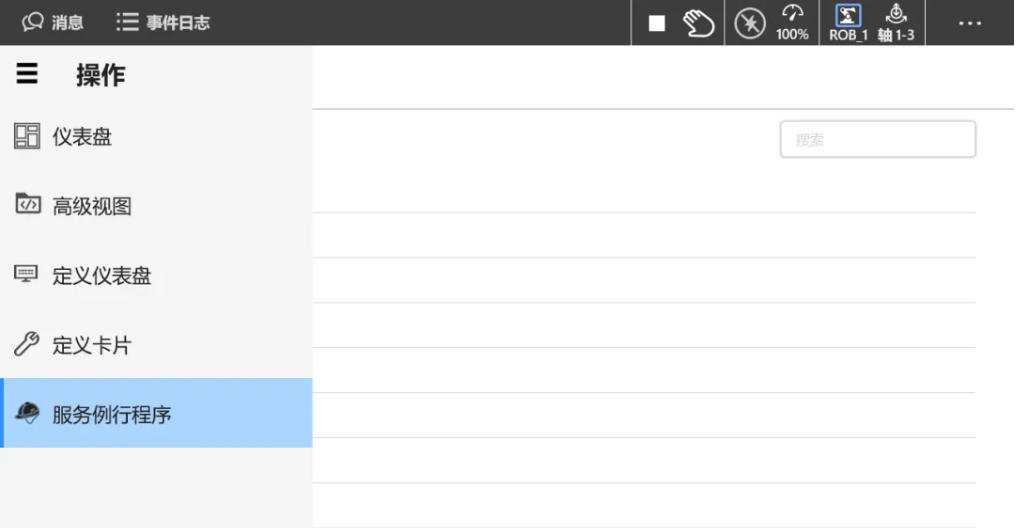
进入负载设置界面在示教器主菜单中,依次选择 “控制面板”→“机器人参数”→“负载数据”,进入负载管理页面。
创建新负载数据点击 “新建”,为当前负载命名(如 “Gripper_10kg”),然后选择 “负载识别” 功能,系统会提示确认负载已安装。
执行负载识别运动确认后,机器人会自动按照预设的低速轨迹运动(通常包括关节旋转、线性移动),过程中系统通过电机电流、扭矩等数据计算负载。
注意:测量过程中不要触碰机器人,避免干扰数据采集。
保存测量结果运动结束后,系统会自动生成负载的重量、重心坐标(X/Y/Z)、转动惯量这四个核心参数,点击 “保存” 即可将数据应用到机器人程序中。
三、关键注意事项
负载必须固定:若测量时负载松动或晃动,会导致重心计算偏差,可能引发机器人运动不稳定。
选择合适运动范围:如果负载尺寸较大,需在 “负载识别” 前调整运动范围,确保机器人带动负载运动时无干涉。
重复测量验证:对于高精度应用(如装配、打磨),建议重复测量 2-3 次,若结果误差小于 5%,则以平均值作为最终负载数据。
以下是 ABB 机器人负载测量的分步操作流程:
准备工作
确保机器人周围无干涉物品,将机器人的 3、4、5、6 轴摇到零位。
在手动操作界面中选定需要测定的工具数据,确保工具已正确安装到位。
进入负载测试程序
在主菜单下,打开程序编辑器。
选择一个程序,如 main 程序,点击 “调试”。
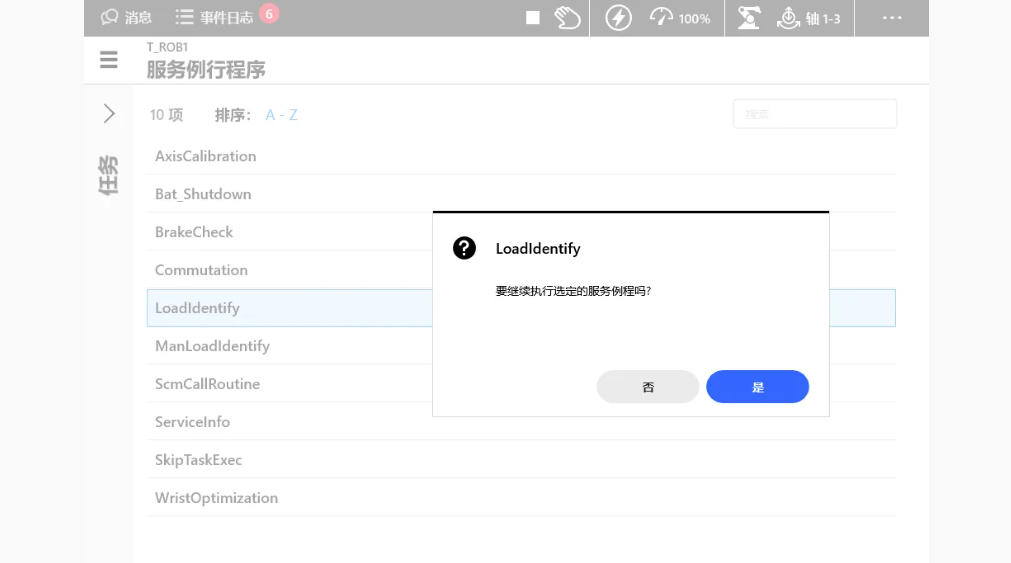
点击 “调用例行程序”,选择 “LoadIdentify”。
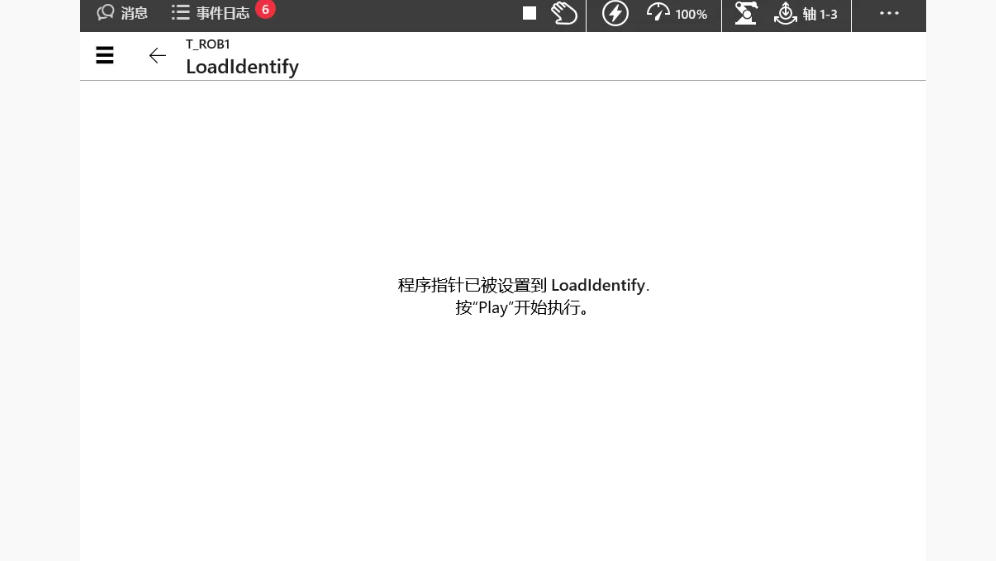
点击 “转到”,进入负载测试程序。
开始负载测量
按下示教器的使能键,再按 “启动” 按钮。
点击 “OK”,确认信息:当前路径将被清除且程序指针将丢失,进入 “工具” 或 “有效载荷” 对话框。
选择 “Payload” 或 “Tool”,出现确认信息:正确的工具或有效载荷在微动控制菜单中处于活动状态,并且工具或有效载荷已正确安装,点击 “OK”。
确认工具名称,点击 “OK”。
选择测定方法和角度
选择测定方法,若不知道负载质量,选择 “Unknow mass”;若已知质量,选择相应选项并确保工具 / 有效载荷具备正确的已定义质量。
选择配置角度,最佳角度是 - 90° 或 + 90°,如果无法做到,点击其他设置角度,最小角度为 - 30° 或 + 30°。

执行测试
若为初次测试,建议先选择进行手动慢速测试,点击 “YES”,再点击 “MOVE”,机器人开始执行慢速测试,过程中要一直按住使能键。
手动慢速测试完成后,提示切换到自动或手动全速模式,建议切换到自动模式,电机上电后,再点击一下程序启动按钮。
机器人开始执行自动测试,此过程会比较长,运动过程中注意观察机器人运动,遇到紧急情况及时停止运行。
完成测量并保存结果
运动测试完成后弹出相应界面,点击 “OK”。
提示切换回至手动模式,切换到手动后使能上电,再点击一次示教器 “开始” 按钮,然后点击右下角的 “OK”。
自动测试出的部分载荷结果会显示在屏幕上,如果需要应用到对应测试的工具数据里,点击 “YES”。
测试完成后,可以在手动操纵界面,点击工具坐标,在 tLoad 一组数据中选中工具数据,查看相关载荷信息,如重量、重心偏移、转动惯性矩等,测定任务完成。
服务商微信客服")